PPO Control with the Standard Open ARM101
Implementation of the Proximal Policy Optimization (PPO) algorithm, tested with the Standard Open ARM101 in IsaacLab and deployed in the real world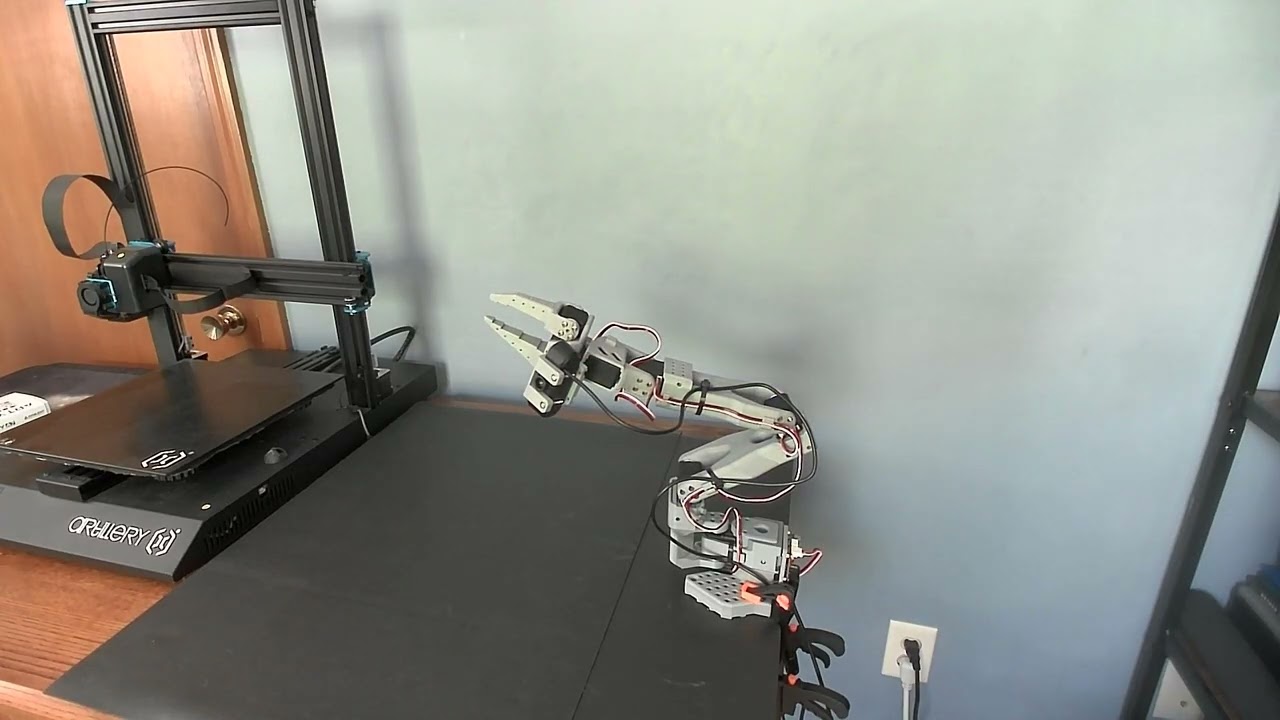

Implementation of the Proximal Policy Optimization (PPO) algorithm, tested with the Standard Open ARM101 in IsaacLab and deployed in the real world
Implementation of the Proximal Policy Optimization (PPO) algorithm, tested with multiple environments within IsaacLab
Finetuning SmolVLA for the SO-ARM101 in the real world.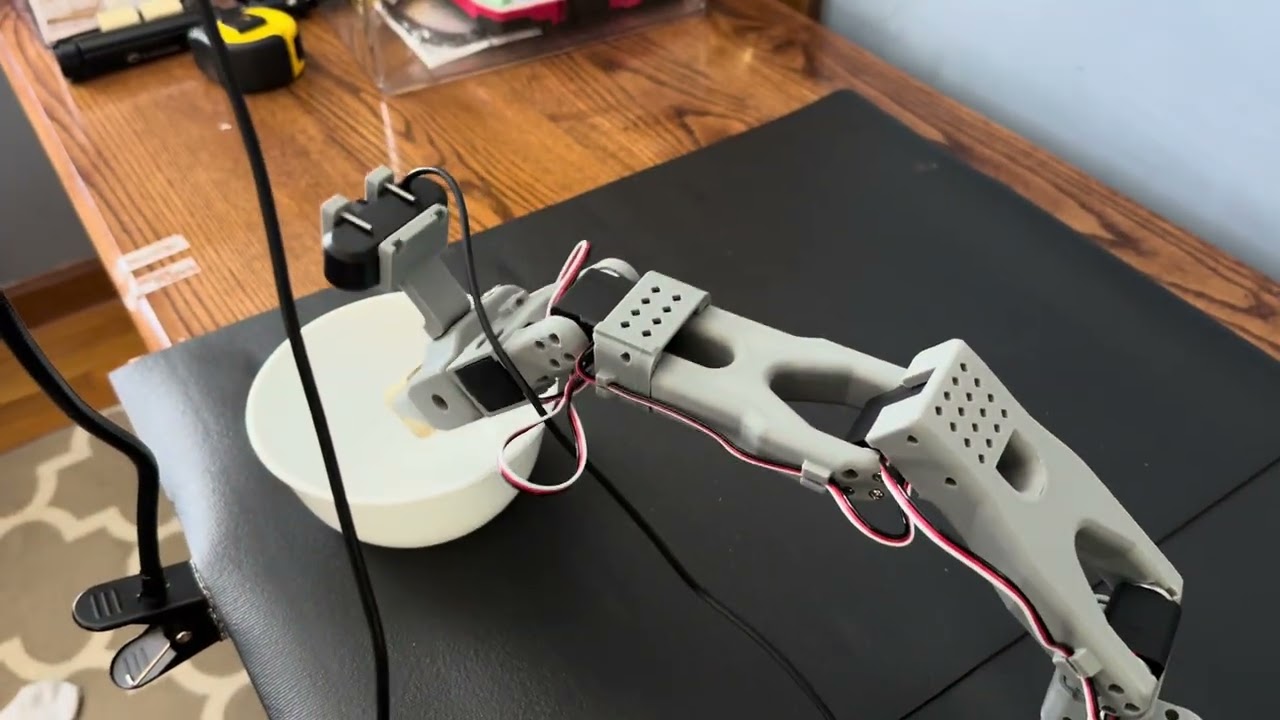
A Texas Hold’em playing Robot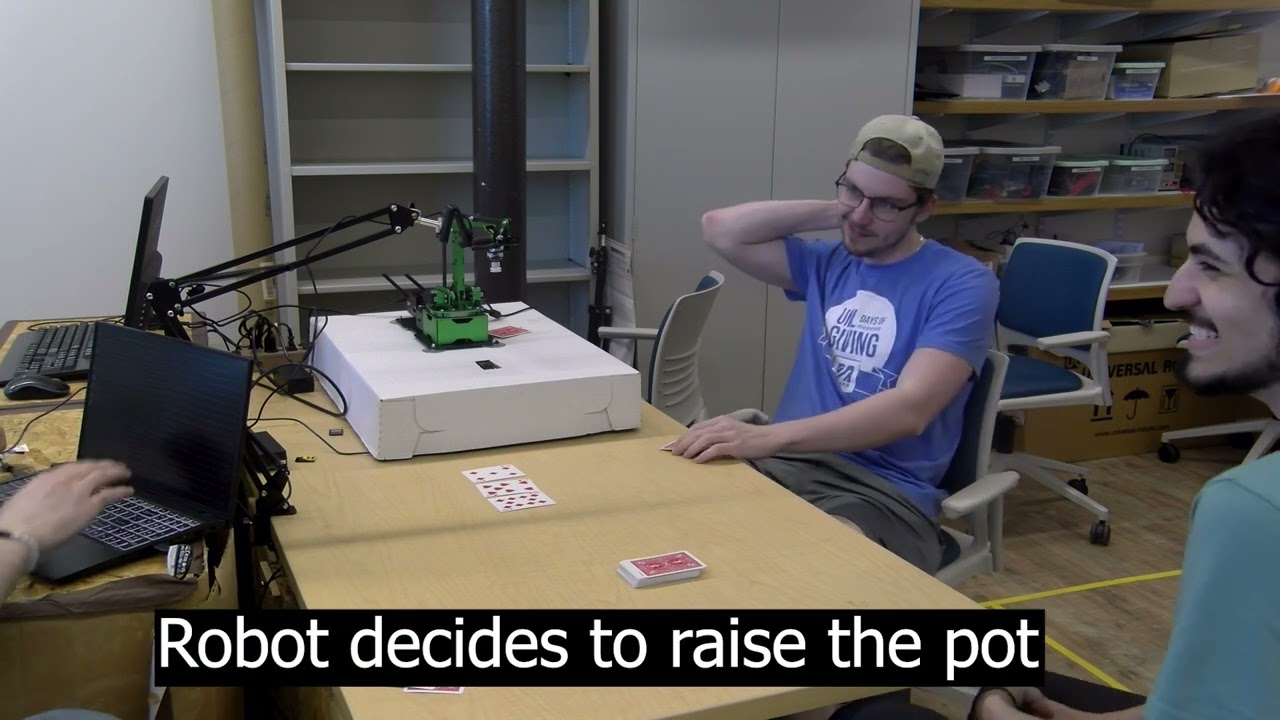
Visual odometry pipeline, and a visual SLAM pipeline. Both tested with the KITTI dataset 

Implementation of the RRT* algorithm with and without differential-drive dynamics within jupyter notebooks
Implementation of the Proximal Policy Optimization (PPO) algorithm, tested with the Atari Pong Gymnasium environment
Review and Update of Electrical Infrastructure for an Existing Underwater Robot
My solutions in Python to the Advent of Code 2025 challenges.
Implementation of the Proximal Policy Optimization (PPO) algorithm, tested with the Lunar Lander Gymnasium environment
Implementation of a VGA driver, and an animated Julia and Fatou set
Implementation of the Deep Q-Network algorithm, tested with the Cart Pole Gymnasium environment
Implementations for various reinforcement learning algrotihms for both discrete and continuous state and action spaces